

در مقالات گذشته که با همین عنوان در سایت شرکت لیان الکتریک ویرا منتشر شده است، در ارتباط با روش DTC و نحوه عملکرد آن توضیحاتی داده شده است. برای کسب اطلاعات بیشتر می توانید مقاله مزیت های استفاده از روش DTC برای کنترل دور موتورها بخش اول مراجعه فرمایید. همانطور که در این سری مقاله بیان شده است، DTC درایو کنترل دور از دو بخش اساسی حلقه کنترل گشتاور و حلقه کنترل سرعت تشکیل شده است. در این مقاله به صورت اجمالی به توضیح هر یک از این حلقه ها خواهیم پرداخت.
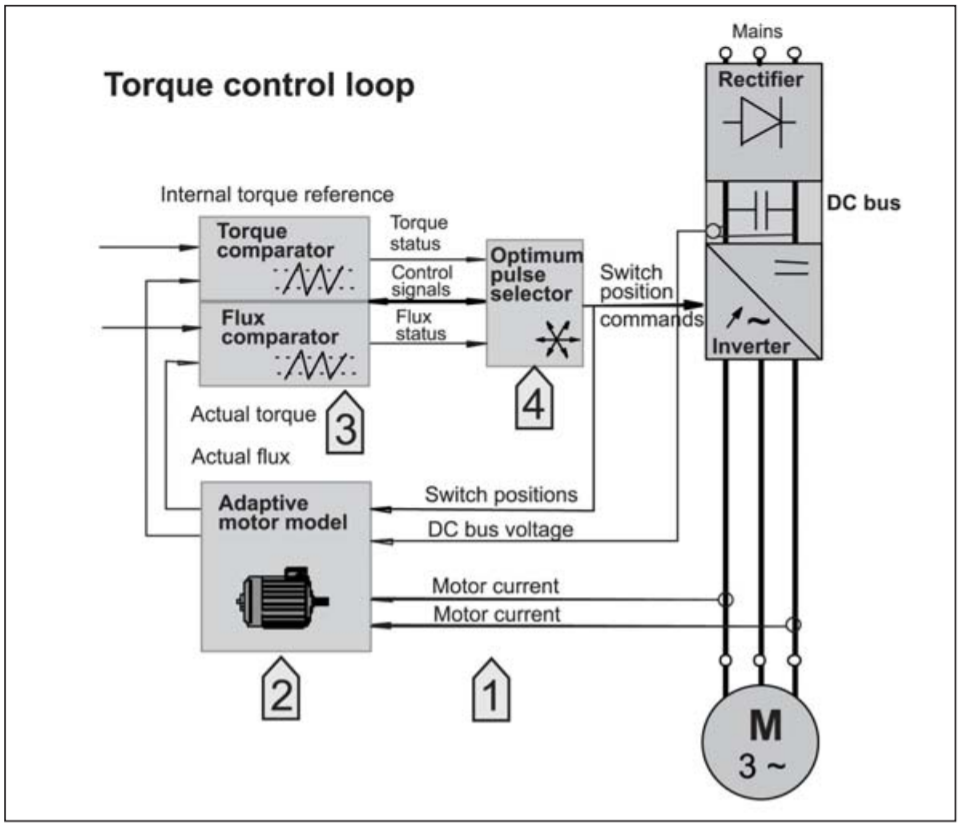
حلقه کنترل گشتاور در درایو کنترل دور:
این حلقه کنترلی شامل چهار مرحله داخلی است. در ابتدا ولتاژ و جریان اندازه گیری می شود. سپس از طریق این اطلاعات دریافتی از موتور و انجام Auto tune یک مدل تطبیقی از موتور تجسم می شود که از طریق آن درایو کنترل دور می تواند رفتار موتور را پیش بینی و کنترل نماید. لذا با کمک این روش به هیچ گونه سیستم فیدبک خارجی برای اتصال به درایو کنترل نیاز نمی باشد. سیگنال های خروجی درایو مستقیما گشتاور واقعی موتور و شار استاتور واقعی را نشان می دهند. همچنین سرعت و مکان شافت به صورت لحظه ای در مدل موتور محاسبه می شود. در ادامه گشتاور واقعی و شار واقعی هر 25 میکرو ثانیه، در یک مقایسه کننده، با مقادیر مرجع مقایسه می شوند تا دقت عملکرد درایو کنترل دور سنجیده شود و میزان پالس بهینه انتخاب می شود. (کنترل حلقه بسته درایو کنترل دور)
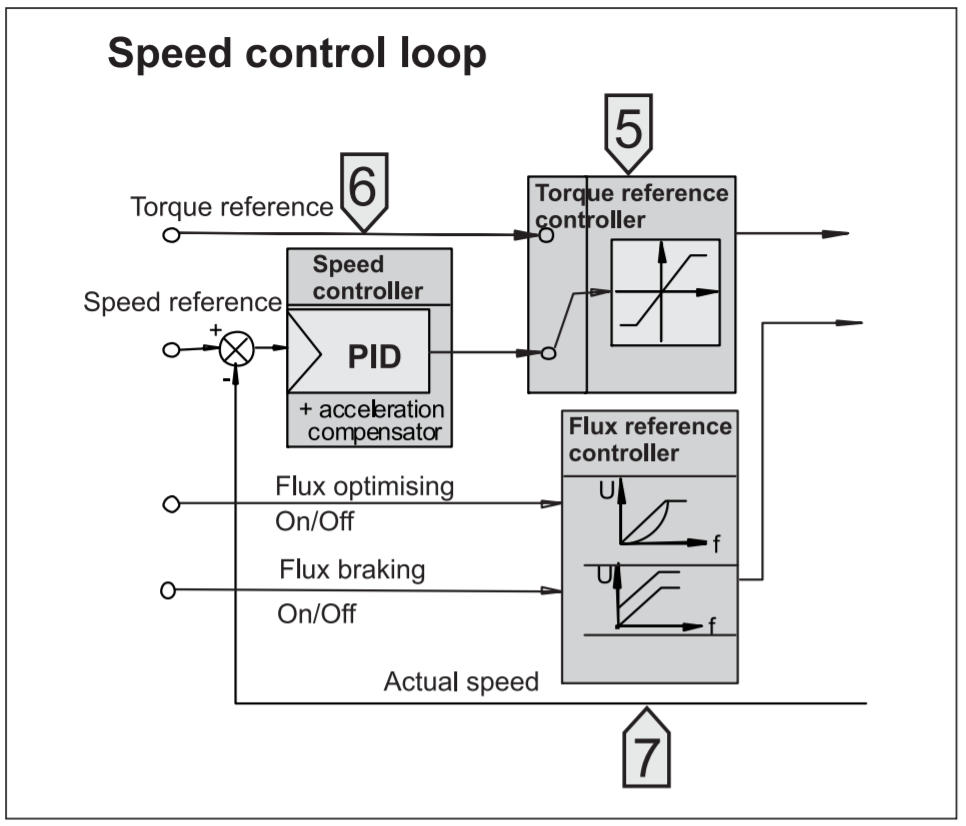
حلقه کنترل سرعت درایو کنترل دور:
در ابتدا مقدار گشتاور مرجع با مقدار گشتاور تولیدی مقایسه می شود. پس از آن همین کار برای سرعت موتور انجام خواهد شد. و در نهایت یک مقدار مطلق از شار استاتور از طریق کنترلر مرجع شار به قسمت مقایسه گر شار اعمال می شود و به این ترتیب حلقه کنترل سرعت با روش DTC در یک درایو کنترل دور تکمیل می گردد.
در صورت تمایل می توانید به بخش مقالات سایت لیان الکتریک ویرا مراجعه فرمایید تا به سایر مطالب علمی مفید گفته دسترسی پیدا کنید. هم چنین برای ادامه خواندن مقاله انتخاب درایو کنترل دور و یا راه انداز نرم با توجه به نیازهای شما بخش اول توصیه می گردد. برای کسب اطلاعات بیشتر در ارتباط با درایوهای کنترل دور می توانید با متخصصین مجرب شرکت لیان الکتریک ویرا تماس حاصل کنید.

){kind=link}
بدون دیدگاه