
-
پارامترهای سرعت ماکزیمم و مینیمم
-
شتاب گیری و کاهش شتاب
-
روش توقف
-
ولتاژ نامی
-
جریان نامی
-
روش کنترلی
-
ماکرو
-
تنظیم پارامترهای مخابراتی
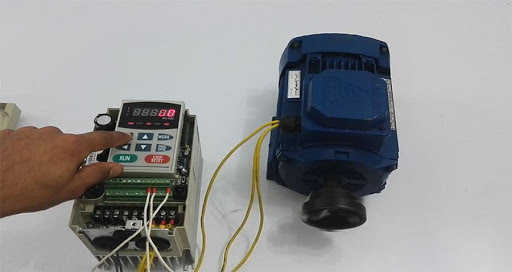
درایو کنترل دور امروزه تنها وظیفه ای که در نامش آن را یدک می کشد را اجرا نمی کند. یک درایو مدرن به ویژگی های متعددی همچون تابع برنامه نویسی منطقی داخلی (PLC)، توابع کنترل حلقه بسته سیستم های مختلف PID، حفاظت های متعدد و کامل، توابع مخابراتی و ارتباطی و همچنین توابع اتوماسیونی برای کنترل سایر اجزای سیستم به جز موتورها مجهز می باشد. این قابلیت ها، درایو کنترل دور را به یک تجهیز هوشمند کامل برای مدیریت موتور و سیستم های وابسته به آن بدل کرده است. این قابلیت های متعدد و مختلف که در طول زمان بسته به نیاز وارد درایو کنترل دور شده اند، مستلزم وجود پارامترهای تنظیماتی مختص به خود بوده اند، به همین دلیل امروزه یک درایو حداقل حدود 100 پارامتر تنظیماتی را شامل می شود که هر کدام جزئیات و پیچیدگی های مربوط به خود را دارند. در این سری مقالات سعی داریم تا بتوانیم پارامترهای اساسی آن را معرفی کنیم و تنظیمات مناسب برای هر پارامتر را معرفی کنیم. میتوانید مقالات درایو کنترل دور چگونه انرژی مصرفی برق را به حداقل می رساند؟ و درایو کنترل دور چیست؟ را مطالعه کنید

-
پارامترهای سرعت ماکزیمم و مینیمم در درایو کنترل دور
درایو کنترل دور می تواند از مرجع سرعت خود هر دستور سرعتی دریافت کند. ممکن است شما از درایو بخواهید که با سرعت 250 هرتز (5 برابر سرعت یک موتور القایی عادی!) به چرخش در بیاید و در صورتی که بهره بردار بدون دانش کافی این کار را انجام دهد ممکن است مشکلات زیادی را برای درایو و موتور ایجاد کند. بنابراین یک محدودیت سرعت باید برای آن تعیین شود که در دو پارامتر محدودیت سرعت ماکزیمم و مینیمم تعریف می شود و هرچه سرعت های بالاتر یا پایین تر نیز دستور داده شود، درایو از این بازه سرعتی خارج نخواهد شد. همچنین مقاله درایو کنترل دور فرکانس متغیر چیست؟ را می توانید مطالعه بفرمایید
-
پارامترهای زمان شتاب گیری و کاهش شتاب درایو کنترل دور
این پارامتر تعیین می کند که درایو کنترل دور با چه شتابی سرعت خود را تغییر دهد. در غالب درایو ها زمانی که شما بر حسب ثانیه در این پارامترها تعریف می کنید، مدت زمانی خواهد بود که درایو از 0 هرتز به 50 هرتز می رود و بالعکس. برای مثال اگر شما پارامتر شتابگیری را روی 10 ثانیه و کاهش شتاب را روی 16 ثانیه تنظیم کنید، درایو کنترل دور در مدت 10 ثانیه از 0 هرتز به 50 هرتز می رسد. حال اگر دستور سرعت 25 هرتز را به آن دهید، موتور در عرض 8 ثانیه از 50 هرتز به 25 هرتز خواهد رسید. مقدار مناسب برای تنظیم این پارامتر کاملا به کاربرد بستگی دارد. به طور کلی، تنظیم مقادیر زمانی خیلی کم، ممکن است باعث شود در بارهای زیاد درایو با خطای اضافه بار مواجه شود. مقاله پلاک درایو کنترل دور حاوی چه مشخصاتی است؟ می تواند به شما کمک کند.

-
پارامتر روش توقف در درایو کنترل دور
درایو کنترل دور نیز مانند راه انداز نرم روش های مختلفی برای توقف موتور در اختیار دارد. روش پیش فرض درایو برای توقف استفاده از شیب کاهش شتاب ست تا توقفی نرم را به وجود بیاورد. اما علاوه بر آن می توان از روش های خلاص، ترمز مقاومتی و ترمز DC نیز بهره برد.
-
پارامتر ولتاژ نامی در درایو کنترل دور
درایو کنترل دور می تواند موتورهایی با ولتاژ های نامی مختلف را کنترل کند. یک درایو 400 ولت می تواند موتورهای 1 تا 400 ولت را کنترل کند، در نتیجه شما باید ولتاپ روی پلاک موتور را در این پارامتر وارد نمایید.

-
پارامتر جریان نامی در درایو کنترل دور
جریان نامی موتور یکی از مهم ترین مقادیری است که درایو کنترل دور باید دریافت کند تا بتواند کنترل مناسبی روی موتور انجام دهد. جریان نامی موتور را می توانید از روی پلاک موتور بخوانید یا با استفاده از توان موتور محاسبه نمایید. درایو از این پارامتر برای برقراری توابع حفاظتی و ایجاد مدل مناسب موتور برای کنترل دقیق بهره می برد.
-
روش کنترلی درایو کنترل دور
همان طور که در مقالات قبل مطرح شد، روش های کنترلی مختلفی در درایو کنترل دور وجود دارند. این روش ها عموما شامل روش اسکالر V/F و روش کنترل برداری می گردد. به طور رایج توصیه می شود که از روش کنترل برداری استفاده نمایید چون کنترل دقیق سرعت و ارائه گشتاور مناسبی را به ارمغان می آورد. هر چند در برخی کاربردها مانند کنترل چند موتور موازی با استفاده از آن نیز بالاجبار باید از روش V/F بهره ببریم. می توانید مقاله انواع روش های کنترل دور موتور در درایو کنترل دور چیست؟ را مظالعه کنید.
-
پارامتر ماکرو در درایو کنترل دور
درایوهای کنترل دور ترمینال های ورودی و خروجی آنالوگ و دیجیتال متعددی دارند. هر کدام از این ترمینال ها می توانند بسته به صلاحدید کاربر و نیاز کاربرد شخصی سازی شوند. با توجه به متعدد بودن ترمینال ها، در نظر گرفتن یک پارامتر مجزا برای هر ترمینال ممکن است کمی گیج کننده و پیچیده به نظر برسد. به همین دلیل و برای راحتی کار بیشتر، برخی سازندگان درایو کنترل دور معمولا تنظیمات دسته بندی شده پیش فرضی برای ترمینال ها ایجاد می کنند که به آن ها ماکرو می گویند و کاربر می تواند متناسب با نیاز خود یکی از آن ها را انتخاب نماید. با انتخاب هر ماکرو، عملکرد تمام ترمینال ها با تغییر یک پارامتر معین می شود و دیگر نیاز نیست کاربر تک تک پارامترهای مربوط به ترمینال ها را تنظیم نماید. شما می توانید مقاله سیگنال های خروجی درایو کنترل دور را نیز مظالعه کنید

-
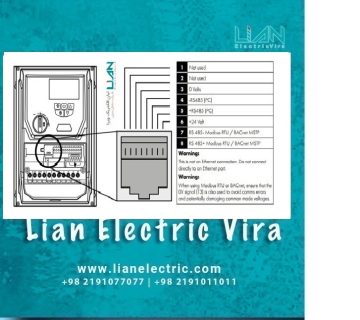
تنظیم پارامترهای مخابراتی
امروزه غالب درایوهای کنترل دور مجهز به پروتکل های مخابراتی می باشند. از جمله پروتکل های رایج در صنعت مدرن مودباس می باشد. پارامترهای مربوط به این پروتکل در درایو کنترل دور شامل آدرس، نرخ تبادل اطلاعات (باود ریت) و برخی تنظیمات جزئی می شود. آدرس یک عدد است که نماد هر اسلیو در شبکه مودباس می باشد. هر تجهیزی مثل درایو کنترل دور باید یک آدرس داشته باشد که از شماره 2 آغاز می گردد. هنگامی که مستر بخواهد با اسلیوها ارتباط بگیرد باید شماره مربوط به آن اسلیو را فراخوانی نمیاد و اطلاعات مورد نیازش را درخواست نماید. نرخ تبادل نیز به شبکه مودباس بستگی دارد و تنظیم نرخ تبادل تمامی اسلیوهای درون شبکه باید روی مقداری که توسط مستر تعیین شده قرار داده شود. مقاله کاربرد درایو کنترل دور در آسانسور چیست؟ به یکی از کاربرد های آن اشاره کرده است

){kind=link}
بدون دیدگاه