
در مقالات گذشته در رابطه با هارمونیک ها و نویز های موجود در درایو کنترل دور توضیحاتی ارائه شده است. برای دریافت اطلاعات بیشتر در این زمینه می توانید مقالات سازگاری الکترومغناطیسی در کنترل دورها و موارد ایمنی مهم در هنگام بهره برداری از درایو کنترل دور را مطالعه بفرمایید. چوک های خط AC و چوک های لینک DC هردو در همواره به همراه درایوهای کنترل دور به عنوان روشی برای کاهش تولید اعوجاج هارمونیکی استفاده شده است. علاوه بر این، روش دیگری که معمولا بهتر نیز جواب می دهد کاهش خازن لینک DC می باشد. در این مقاله به بررسی مزایای هر یک از این روش ها خواهیم پرداخت.
مزایای خازن لینک DC کاهش یافته در مقایسه با چوک های AC و DC :
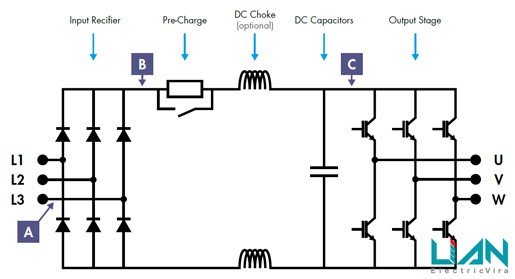
طراحی مدار درایو کنترل دور معمولی، اکثریت قریب به اتفاق درایو های کنترل دور مورد استفاده در سراسر جهان امروز مبتنی بر یک طراحی مدار کاملاً مشابه هستند، همانطور که در شکل زیر نشان داده شده است. این شامل یک مرحله یکسوساز ورودی است، که منبع تغذیه ورودی ورودی (تک یا سه فاز) را به منبع تغذیه مستقیم تبدیل می کند.
سپس خازن ها اضافه می شوند تا این منبع تغذیه صاف شود و ولتاژ DC پایداری ایجاد شود که می تواند مجدداً به AC تبدیل شود تا برق را با فرکانس متغیر تأمین کند. مدار قبل از شارژ برای تأمین شارژ نرم خازن های DC فقط در دوره زمانی که درایو کنترل دور برای اولین بار روشن است استفاده می شود و پس از آن بای پس می شود.
مشخصات مدار
نمودارهای زیر شکل موج ولتاژ معمولی موجود در نقاط نشان داده شده در مدار را در شکل قبل را نشان می دهد. هنگامی که هیچ بار در خروجی وجود ندارد، خازن های DC سطح ولتاژ DC داخلی را در نقطه C نزدیک به اوج ولتاژ منبع تغذیه سینوسی حفظ می کنند. با افزایش بار در خروجی ، خازن ها ملزم به شارژ از طریق یکسوساز ورودی و تخلیه از طریق مرحله خروجی برای حفظ جریان خروجی به موتور هستند، ولتاژ DC روی خازن ها کمی “موج می زند”.
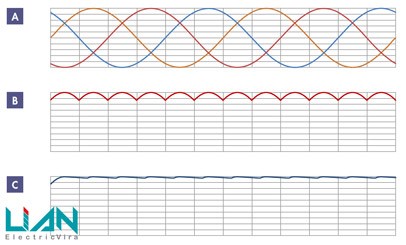
برای قسمت عمده ای از زمان، سطح ولتاژ پیوند DC بالاتر از ولتاژهای فاز تغذیه ورودی درایو کنترل دور تصحیح شده است و بنابراین هیچ جریانی از یکسو کننده ورودی عبور نمی کند. جریان در واقع فقط از منبع نزدیک به اوج موج سینوسی AC گرفته می شود. این بدان معنی است که جریان به درایو کنترل دور مانند جریان در موتور AC سینوسی نیست، بلکه یک شکل موج بسیار پیچیده تر است. (رله ها و خروجی های آنالوگ در درایوهای کنترل دور بخش اول)
ماهیت این شکل موج عمدتا به موارد زیر بستگی دارد:
- امپدانس منبع تغذیه ورودی
- امپدانس داخل درایو کنترل دور
- ظرفیت کل پیوند DC
- بار خروجی

{kind=link}
بدون دیدگاه