
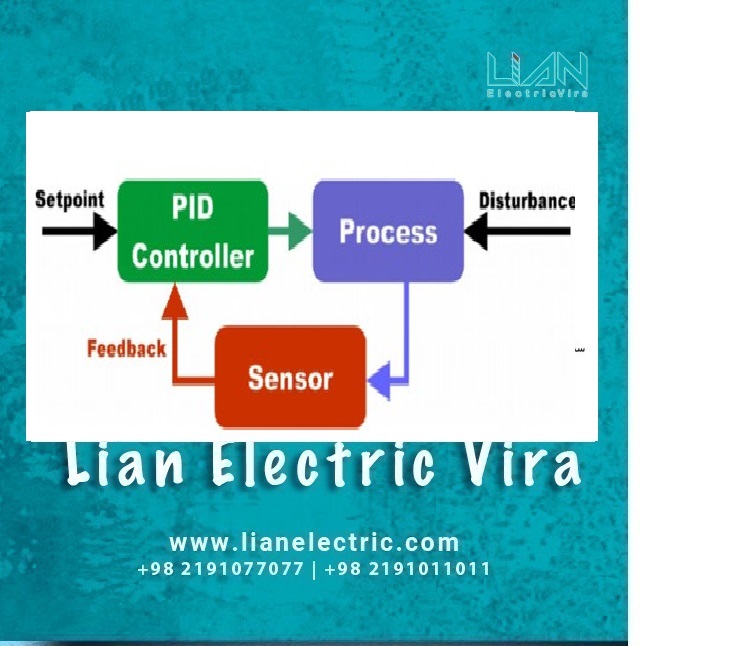
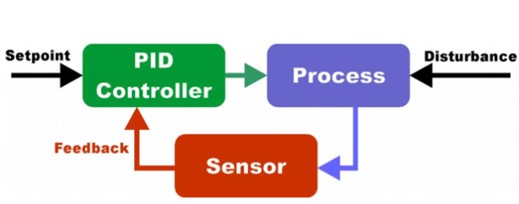
کنترل PID به معنای کنترل متغیرهای Proportional ، Integral و Derivative است. این روش کنترل، یک روش پرکاربرد در سیستمهای کنترل خودکار است و به طور گستردهای در کنترل سیستمهای الکترومکانیکی از جمله درایوهای کنترل دور اینورتک مورد استفاده قرار میگیرد.
در درایوهای Invertek، کنترل PID معمولاً برای کنترل سرعت و جریان موتورها استفاده میشود. کنترل PID در اینورتر اینورتک با استفاده از الگوریتمها و پارامترهای مرتبط، قادر است خروجی خود را بر اساس خطای کنترل (اختلاف بین مقدار مطلوب و واقعی)، سرعت تغییر خطا و مجموع خطا قرار دهد.
در کنترل PID کنترل دور اینورتک، مؤلفه نسبی (Proportional)، خطا را با ضرب ضریبی مشخصی در خروجی درایو اینورتک تنظیم میکند. مؤلفه تکمیلی، مجموع خطا را در طول زمان تکمیل میکند و مؤلفه انتگرال، سرعت تغییر خطا را کنترل میکند. این سه مؤلفه با هم ترکیب شده و با تنظیم پارامترهای PID مناسب، کنترل دقیق و بهینه سرعت و جریان موتورها را فراهم میکنند.
درایوهای Invertek معمولاً قابلیت تنظیم پارامترهای PID را در اختیار کاربر قرار میدهند. با تنظیم صحیح این پارامترها و آزمایش و تنظیم بهینه کنترل PID، میتوان عملکرد درایو اینورتک را بهبود داده و کنترل دقیقتری را برای موتورها فراهم کرد.
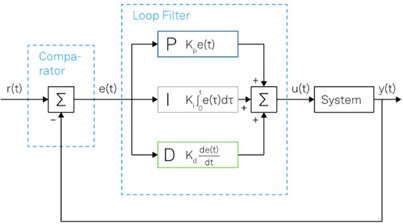
کنترل PID یک روش پرکاربرد در کنترل سیستمهای الکترومکانیکی است و Invertekdrive نیز از این روش برای کنترل سرعت و جریان موتورها استفاده میکند. PID مخفف Proportional-Integral-Derivative است که سه مؤلفه اصلی آن را تشکیل میدهند.
- مؤلفه نسبی (Proportional): این مؤلفه خطا بین مقدار مطلوب و مقدار واقعی را با ضریبی نسبت میدهد. با تنظیم این ضریب، میزان واکنش درایو اینورتک به خطا تغییر میکند.
- مؤلفه تکمیلی (Integral): این مؤلفه مجموع خطا را در طول زمان محاسبه میکند و از طریق تنظیم ضریب تکمیلی، تاثیر آن را در کنترل خروجی اینورتر اینورتک میگذارد. این مؤلفه برای تعدیل خطاهای ماندگار و تنظیم دقت سیستم کنترل استفاده میشود.
- مؤلفه انتگرال (Derivative): این مؤلفه نرخ تغییر خطا را کنترل میکند. با تنظیم ضریب انتگرال، میزان تأثیر تغییرات سریع خطا بر خروجی invertek کنترل میشود.
تنظیم پارامترهای PID برای کنترل بهینه درایوهای اینورتک بستگی به سیستم مورد نظر، نوع کاربرد و خصوصیات عملکرد آن دارد. همچنین، فاکتورهای دیگری مانند دقت مورد نیاز، زمان پاسخ و پایداری نیز در تنظیم این پارامترها تأثیرگذار هستند. از این رو، مقادیر مناسب برای تنظیم هر یک از ضرایب PID به صورت عمومی تعیین نمیشود و نیاز به آزمایش و تنظیم تجربی دارد.
برای تنظیم پارامترهای PID اینورتر اینورتک، میتوان روشهای مختلفی را به کار برد. یکی از روشهای معمول برای تنظیم پارامترهای PID، روش آزمون و خطا (Trial and Error) است. در این روش، ابتدا ضریب نسبی را بزرگترین مقدار ممکن قرار میدهیم و سپس ضریب تکمیلی و انتگرال را صفر تنظیم میکنیم. سپس سیستم را به حالت عملیاتی میبریم و واکنش درایو اینورتک را به خطا مشاهده میکنیم. اگر خطا به طور مداوم افزایش یابد و سیستم به سرعت از کنترل خارج شود (جلوگیری از پایداری)، ضریب نسبی را کاهش میدهیم. اگر خطا به طور مداوم کاهش یابد و سیستم به سرعت به مقدار مطلوب همگرا شود (جلوگیری از پایداری)، ضریب نسبی را افزایش میدهیم. این روند را تا رسیدن به مقدار مناسب برای ضریب نسبی ادامه میدهیم.
بعد از تنظیم ضریب نسبی کنترل PID کنترل دور اینورتک، میتوان به تنظیم ضریب تکمیلی و انتگرال پرداخت. در این مرحله، ضریب نسبی را در مقدار مناسب ثابت نگه میداریم و ضریب تکمیلی را به تدریج افزایش میدهیم. اگر با افزایش ضریب تکمیلی، سیستم به سرعت به مقدار مطلوب همگرا شود اما به شدت پاسخ گویی و پایداری خوبی نداشته باشد، ممکن است نیاز به تنظیم ضریب انتگرال باشد. افزایش ضریب انتگرال میتواند پاسخ گویی سیستم را تسریع کند و دقت کنترل را افزایش دهد.
مهمترین نکته در تنظیم پارامترهای PID درایو اینورتک، تجربه و دانش متخصصانه که در تنظیم این پارامترها بدست میآید است. روشهای دیگری مانند روشهای مبتنی بر مدل و روشهای بهینهسازی نیز برای تنظیم پارامترهای PID استفاده میشوند.
در هر صورت، توصیه میشود که برای تنظیم پارامترهای PID درایو اینورتک، از روش آزمون و خطا و تجربههای عملی استفاده کنید. این شامل آزمودن مقادیر مختلف برای ضریب نسبی، ضریب تکمیلی و ضریب انتگرال و بررسی واکنش سیستم به خطا و تغییرات مورد نظر است. با تجربه و تمرین، میتوانید به تنظیم مناسب برای ضرایب PID تابلو کنترل دور اینورتک برسید که برای سیستم خاص شما بهینه است.


{kind=link}
بدون دیدگاه