
کنترل PID یکی از روشهای متداول برای کنترل دور در درایوهای لیان است. با استفاده از پارامترهای PID در درایو لیان سری lev550، میتوان دقت، پایداری و عملکرد بهتری در کنترل سرعت و دور موتورهای الکتریکی ارائه داد.
درایو کنترل دور لیان معمولاً شامل موتورهای الکتریکی هستند که نیاز به کنترل دقیق سرعت و دور دارند. با استفاده از کنترل PID در درایو لیان، سیگنال کنترلی به موتور تنظیم میشود تا سرعت آن به مقدار مورد نظر برسد و در حالت پایدار باقی بماند.
درایوهای تولیدی لیان الکتریک ویرا سری LEV500 همگی دارای کنترل PID به صورت داخلی هستند و نیازی به اضافه کردن کنترل PID خارجی یا ادوات کنترلی دیگر مانند PLC ندارد و کنترل دقیق و مناسب سرعت موتور را با کنترل PID داخلی صورت میگیرد.
کنترل PID
PID مخفف Proportional-Integral-Derivative است و یک نوع کنترلکننده است که برای کنترل خودکار فرایندها و سیستمهای مختلف استفاده میشود. این کنترلکننده با استفاده از ترکیب سه عنصر Proportional (P)، Integral (I) و Derivative (D) عملکرد بهینه کنترل را فراهم میکند.
- عنصر Proportional (P): با نسبت مستقیم با خطای کنترل (فرق بین مقدار مورد نظر و واقعی) عمل میکند و به میزان خطا وابسته به طوری که با افزایش آن، خروجی درایو لیان نیز افزایش مییابد.
- عنصر Integral (I): مقدار متغیر کنترلی را بر اساس مجموع خطاهای گذشته تنظیم میکند. این کار باعث کاهش خطاهای پایدار و حذف خطاهای متعدد ناشی از متغیرهای خارجی میشود.
- عنصر Derivative (D): با تشخیص نرخ تغییرات خطا، پاسخ کنترلی را تنظیم میکند. این کار باعث کاهش پاسخهای گسترده و جلوگیری از افزایش خطا در زمان کوتاه میشود.
با تنظیم مناسب پارامترهای P، I و D، کنترلکننده PID میتواند بهبود قابل توجهی در دقت و عملکرد سیستمهای کنترلی به ویژه کنترل دورهای لیان ایجاد کند.
الزامات راهاندازی کنترل PID
الزامات راهاندازی کنترل PID شامل موارد زیر میشود:
- درایو کنترل دور دارای PID داخلی باشد. لازم به ذکر است که تمامی درایوهای تولیدی شرکت لیان الکتریک ویرا دارای کنترل PID به صورت داخلی میباشند.
- سنسور فشار مربوط به کاربرد مورد نظر متصل شده باشد.
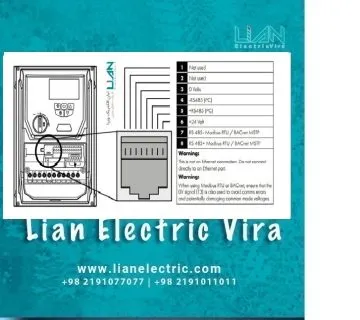
- سنسور فشار به ورودی مناسب درایو متصل شده باشد.
- مرجع فرمان درایو لیان بر روی کنترل PID قرار بگیرد.
- تنظیمات PID انجام شود. (گروه پارامتری ۲۷ درایوهای لیان)
پارامترهای PID در درایو لیان
در گروههای پارامتری درایو کنترل دور لیان سری lev550 گروه پارامتری ۲۷ مخصوص تنظیمات PID میباشد. پس از ورود به این گروه پارامتری در درایو لیان تنظیمات PID نمایش داده میشود. که میتوان به ترتیب پارامترها را مشاهده کرده و براساس کاربرد مورد نظر اقدام به تنظیم کرد. در جدول زیر مهمترین پارامترها برای تنظیم PID در درایوهای تولیدی لیان الکتریک ویرا آمده است و میتوان با استفاده از این جدول هر کاربردی را با کنترل PID کنترل کرد.
|
پارامترهای PID |
توصیف |
مقدار تنظیم |
|
27.00 PID active |
فعال و غیر فعال کردن کنترل PID |
1 |
|
0=Disable 1=Enable |
||
| 27.01 Reference source |
منبع سیگنال برای ست پوینت را انتخاب کنید |
P.27.02 |
|
کاربر میتواند سیگنال موردنظر خود را انتخاب کند.در اینجا ما مرجع دیجیتال داخلی را درنظر گرفتیم. |
||
|
27.02 Ref internal |
مقدار مرجع دیجیتال (Setpoint) |
* |
|
مقدار مرجع دیجیتال از پیش تععین شده برای کنترلر PID است.با تنظیمات انجام شده این پارامتر برحسب RPM انتخاب میشود.به فرمول مراجعه کنید |
||
| 27.06 Feedback1 source |
منبع سیگنال فیدبک 1 را انتخاب کنید |
AI2 scaled=517 |
|
ورودی که سنسور به آن متصل است انتخاب کنید |
||
|
27.15 PID Kp |
ضریب تناسیی |
1-2 |
|
خطای لحظه ای بین فیدبک و ست پوینت در این پارامتر ضرب میشود تا خروجی PID را تولید کند.انتخاب مقادیر بالا ممکن است باعث ناپایداری شود |
||
|
27.16 PID Ti |
ثابت زمان انتگرالی |
1-5 s |
|
از جمع خطاها بین ست پوینت و فیدبک برای تاثیر روی خروجی کنترلر استفاده میکند.برحسب ثانیه. |
||
|
27.21 Out Max |
بیشترین مقدار خروجی PID را تنظیم کنید |
3000 |
|
بیشترین مقدار خروجی PID را با سرعت نامی موتور تنظیم کنید |
||
|
27.22 Out Min |
کمترین مقدار خروجی PID را تنظیم کنید |
0 |
|
کمترین مقدار خروجی PID را بر روی صفر تنظیم کنید. |
در ادامه به معرفی هر کدام از پارامترها میپردازیم:
پارامتر ۲۷.۰۰ : در این پارامتر میتوان به طور کلی عملکرد کنترل PID درایو لیان سری lev550 را فعال یا غیرفعال کرد.
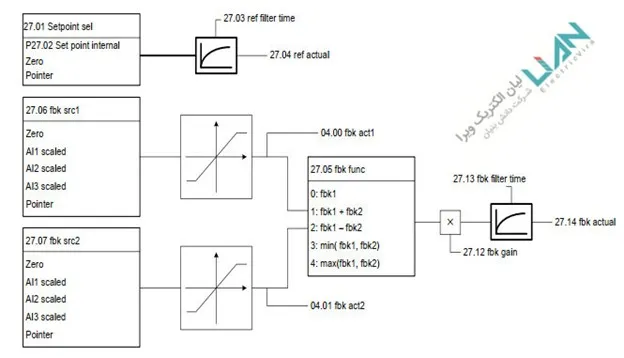
پارامتر ۲۷.۰۱ : در این پارامتر مرجع انتخاب ست پوینت انتخاب میشود. درایوهای کنترل دور تولیدی لیان الکتریک ویرا از دو طریق ست پوینت دریافت میکنند. اول روش برای تعیین ست پوینت زمانی میباشد که ست پوینت مقداری ثابت است و تغییر نمیکند که میتوانید در پارامتر ۲۷.۰۲ آن مقدار را وارد کنید. روش دوم زمانی است که ست پوینت مقداری متغیر را به درایو لیان ارسال میکند که میتوان هر کدام از ورودیهای آنالوگ درایو را انتخاب کرد.
پارامتر ۲۷.۰۲ : وارد کردن مقدار ست پوینت ثابت به درایو لیان
پارامتر ۲۷.۰۶ : این پارامتر در درایو لیان سری lev550 انتخاب سنسور فیدبک میباشد. که میتوان هر کدام از ورودیهای آنالوگ درایو لیان را انتخاب کرد.
پارامتر ۲۷.۱۵ : تنظیم ضریب تناسبی کنترل PID در درایو لیان
پارامتر ۲۷.۱۶ : تنظیم ضریب انتگرالی کنترل PID در درایو لیان
پارامتر ۲۷.۲۱ : در درایوهای لیان امکان تنظیم بیشترین و کمترین مقدار برای کنترل PID وجود دارد. در این پارامتر میتوان بیشترین مقدار خروجی PID را تنظیم کرد.
پارامتر ۲۷.۲۲ : در درایوهای لیان امکان تنظیم بیشترین و کمترین مقدار برای کنترل PID وجود دارد. در این پارامتر میتوان کمترین مقدار خروجی PID را تنظیم کرد.
در صورتی برای تنظیم کنترل PID با درایوهای لیان با مشکل روبرو شدید میتوانید با کارشناسان شرکت لیان الکتریک ویرا تماس بگیرد.
{kind=link}
بدون دیدگاه